Telemetry and telecommand: (RSL)
- UHF-band frequency
- 9.6 kbit/s
- CAN protocol
- Dual redundant
Our command link is built to provide a connection that is as reliable as possible. The data speed is low, but the purpose is to give commands that are quite small and get back vital telemetry.
Power production and distribution: (RSL)
- Solar panels
- Li-ion batteries
- CAN protocol
- Failure detection, isolation and recovery
The heart of the spacecraft. Keeps the satellite alive.
Onboard data-handling: (RSL)
- TI Hercules MCU
- Real-time OS
- Dual redundant
- CAN protocol
A low power computer that can be the brain in any mission coordinating the work of other subsystems and payload.
Attitude determination and control:
- Proprietary algorithms
- Sun sensors, IMU
- Magnetorquers
- CAN protocol
- GPS
Points the satellite at Earth so we can take hyperspectral images of the ground.
Payload data-processing:
- ARM-processor
- Control FPGA
- Linux OS
- Cameralink
- CAN protocol
Commands the hyperspectral imager over an FPGA module and post-processes the data into consumable form. Ability to easily upload more functionality.
Data transmission:
“Faster downlink of hypercubes.”
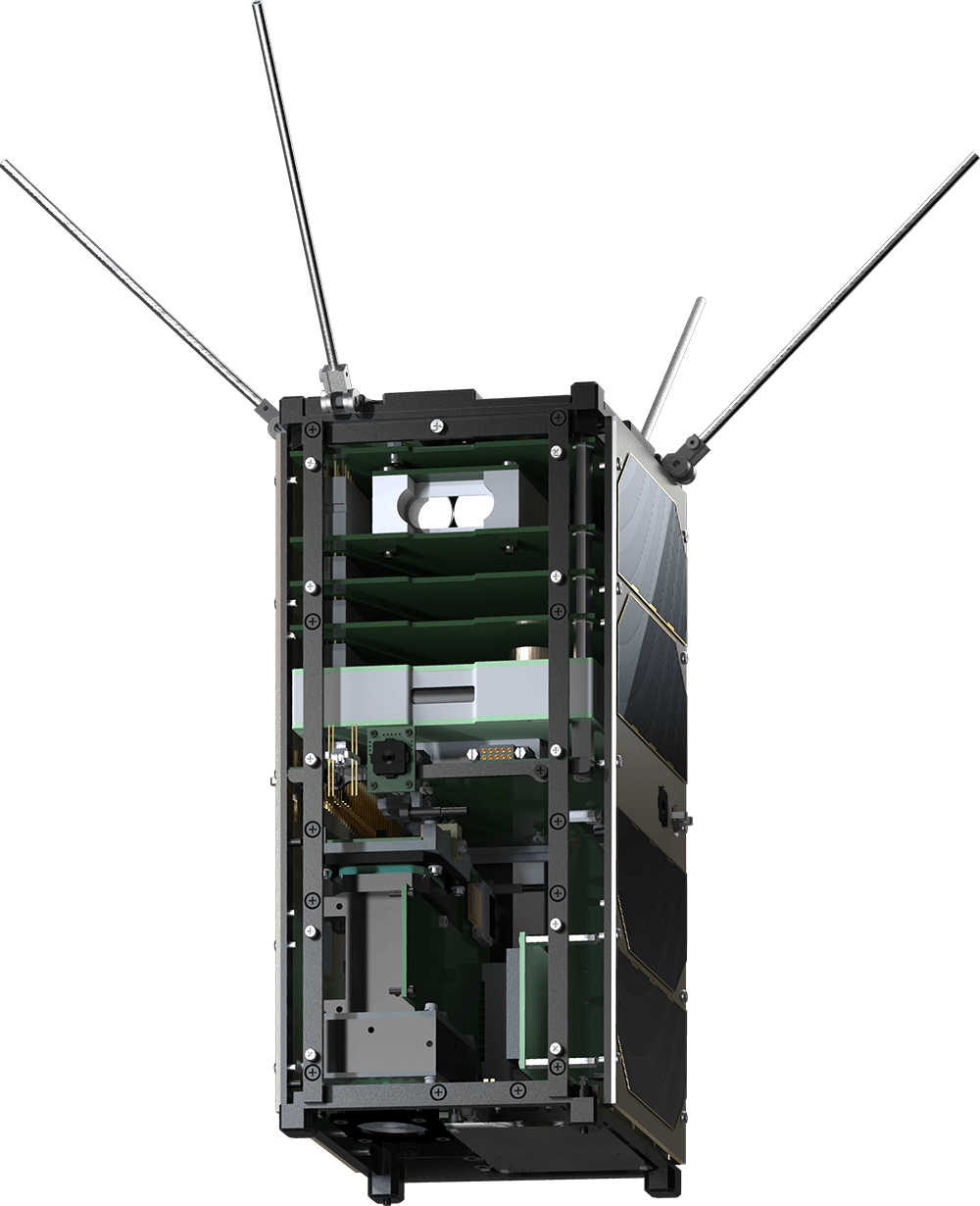
Structure: (RSL)
- Anodized aerospace grade aluminum
- Customized and scalable
- Completely designed, prototyped and tested in-house
Keeping it all in one piece.
You may remember our previous communication about a Node.js satellite. While we didn’t end up using actual Javascript on the satellite, the core promise of using a high level scripting language to run the satellite did become reality. Script files stored on the file system of a Linux computer are easily updated by uploading new files over rsync or logging in with telnet and editing files live with vi.
In order to start writing high level code we of course had to implement the plumbing in the platform. That has been done using for example C, C++, and Verilog. Some of our subsystems have no operating system, some use the facilities of FreeRTOS, and there’s a Linux box too.
All of them implement the Cubesat Space Protocol with the open source libcsp library over a CAN bus inside the satellite and the communications subsystem broadcasts the packets to the outside world. We use a TCP to CSP proxy to enable using rsync, telnet, and other TCP protocols to orbit.
And yeah, the high level scripting language we do use instead of Node.js is of course POSIX shell!
Infrared hyperspectral imager
- High spectral resolution
- In-orbit tunable filter
- 900 – 1400 nm
- 0.5U size
World’s smallest space-grade hyperspectral imager. Based on a tunable Fabry-Perot interferometer.
 RHW Tweets
RHW Tweets